
The following article appeared in the September 1997 issue of Hang Gliding magazine.
Introduction
Flex wing hang glider technology seems to be poised on the brink of a paradigm shift. As was the case with batten supported tip chord extension 22 years ago, and enclosed crossbar double surfaces seventeen years ago, the new semi-cantilevered spar “topless” technology appears to have changed to course of high performance flex wing design evolution. This is the story of the development of one such glider.
Flex wing hang glider design is an in-exact and intuitive process – more so than rigid wing design. The basic aerodynamic principles are the same, but the geometry of a flex wing is continually changing in response to flight conditions and as a result there are more variables to deal with. This is one reason why progress tends to be incremental. What are seen in retrospect as watershed events in the history of hang gliding design, which are often thought of as resulting from especially innovative new design ideas, are in reality simply the points in time during an iterative and incremental design evolution when an important idea is made so compellingly practical that it changes the course of equipment development. Many of the design concepts which have revolutionized flex wing design were failures the first time, or the first several times they were attempted. The true design challenge is not to come up with the new ideas, but to make an idea work, or work better. The development of what have come to be known as “topless” gliders is a good example of this principle. The essential elements of the semi-cantilevered structure were introduced at least twenty years ago. Four years ago, they were refined and reintroduced in a few prototype competition gliders. Two years ago, they were mature enough to justify serial production by at least two manufacturers. By late 1996, they finally demonstrated a compelling performance advantage. This year, they are available from every major manufacturer worldwide. It has taken the collective efforts of dozens of companies many years to get a very simple idea ready for market.
One of the lessons I learned at Wills Wing twenty years ago is that almost anything will fly. We seldom take prototypes to the training hill for first flights, nor do we have a great deal of concern about prototype flight test safety. Most prototypes are trimmed close enough and are responsive enough to be safely controllable on the first flight. However, very few are even close to ready for production. Most take months of flight testing and incremental modifications to solve relatively minor problems. As designers we cannot anticipate all of the factors that will influence the flight characteristics of an entirely new design. This briefly explains why it took only a few weeks to get Fusion prototype number one on the test vehicle and in the air (flying quite nicely), and 6 months of equally intensive effort to finish the development.
Although Wills Wing has been in the forefront of technological development in high performance flex wings, we made a careful and deliberate decision to wait on the development of topless technology. There were several reasons for this. For one, we were concerned about whether the concept could be made to work from an engineering standpoint. Certainly the structural issues could be solved, (though at a substantial cost in either the weight or the price of the glider, or both). It wasn’t as clear that the stability issue could be adequately addressed. Reflex support bridles are a very effective means of providing a strong nose up pitching moment at low angles of attack, without requiring excessive pitch stability in the flying angle of attack range. Without a kingpost there would be no place to hang the bridles from and other stability systems would need to be invented. Second, we were concerned about the effect of this technology on the future of the sport. It was clear there would be an unavoidable increase in product price. Going topless, and attaining adequate strength without excessive glider weight would require the use of composites, adding very substantially to the development and material costs of a topless glider. As a result, the retail price could be expected to be 20% (or more) higher. Clearly the extra performance has been perceived as a good value for competition minded pilots, because topless gliders have dominated the participation and standings of every major contest in 1997. However, the top competition pilots don’t buy gliders, and the technology can only pay for itself if enough pilots who do buy gliders perceive the extra cost as worth it. If recreational pilots considered the extra performance desirable enough to keep sales at a moderate level, the prices would be stable or even come down. If not, the high performance, non-competition market could end up in a Catch 22 situation; advanced pilots might be unwilling to pay for topless technology, yet may be unsatisfied with conventional performance. If this became the case, the manufacturers of topless gliders wouldn’t have the ability to recover their development costs or support the production costs of the more expensive technology. The market reaction to these new products is a significant issue to us because we need both industry growth and increased pilot participation to sustain the hang gliding community.
Because of these concerns, we were very slow and late starting development of the Fusion. We rely on our competition pilots to provide feedback for new product development and initiatives. Yet through the summer of 1996, they were relatively unimpressed by topless competitors. In June, I decided to retrofit an internal stability system on an XC to evaluate its effectiveness, and on June 6th and June 27th we tested the glider on the test vehicle. The results were mixed. After a few modifications to the initial setup, pitch stability was close to HGMA certifiable levels but significantly less than it had been with the conventional bridle support. In August, Chris Arai and Jim Lee traveled to Hungary to compete in the European Championships. Their return in September was the turning point in our ambivalent development program. Their consensus was that there was no point in going to any more competitions without a topless glider. Chris had plans to go to Australia at the end of December for competitions in January, so that pretty much defined our timetable.

Prototype Development Summary
The design program for the Fusion can be considered as several distinct components.
1. Spar and transfer coupling development.
2. Longitudinal stability devices-development; implementation.
3. Handling and performance: sail design; airfoil design; flight testing and tuning.
4. Other hardware: VG system; elevated hang system.
What makes a process like this one so challenging is that you can’t fully evaluate the glider until everything is integrated, nor can you simply isolate the sources of a given problem or set of problems. In a simple example, we might note that a prototype is 3 mph slower in top speed than it used to be. It could it be from an airfoil change, or a new sprog configuration which kicks in at a higher angle of attack. Perhaps the last set of vehicle tests stretched the sail. It could be as simple as an airspeed indicator being out of calibration or any of number of other explanations.
For a given glider, eliminating the kingpost and associated rigging guarantees a significant performance gain at higher speeds. Simply upgrading the XC to a topless airframe configuration to achieve this advantage would have been worthwhile, but it would have compromised other important objectives. Hang glider pilots spend most of their time at slow speeds. I believe that good climb performance and comfortable handling in rough air are even more valuable than the best top end performance. In particular, an ideal glider should not change attitude when subjected to gusts and should have a mellow stall break with no delay in the airflow re-attachment that allows stall recovery. Also, making a glider feel stable in turbulence is somewhat at odds with developing responsive handling. At the same time, as important as these handling qualities are, their interpretation is very subjective which makes them the most difficult to evaluate, quantify and improve. It often takes different pilots many flights, in a variety of conditions before we reach a consensus for even one configuration. Improving these properties in the Fusion was a top priority during flight testing and eventually consumed a series of 7 prototype sails and significant changes to the airfoil profile before we were satisfied.
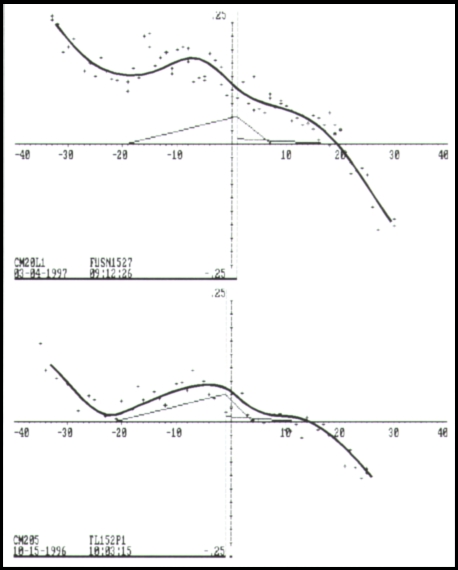
We had first talked with Eric Raymond in early summer of 1996 about developing a composite spar. Eric has specialized in aircraft carbon structures development for ten years, most notably designing the Sunseeker, an ultralight solar-powered high performance sailplane. Eric piloted the Sunseeker in 1990 on the only transcontinental solar aircraft flight made to date. I called Eric in September of 1996 right after reading Jim Lee’s trip report from the European championships. We cooperatively engineered the first configuration composite spar and Eric fabricated the first set of spars within two weeks. On October 15th, we did preliminary vehicle tests on our first prototype Fusion. These included pitch tests at twenty and 37 mph (two of the three speeds required for HGMA certification) as well as a positive limit load test to 1000 lbs at 50 mph, and a negative limit load test to 580 lbs at 40 mph. The pitch test results showed bare minimum compliance with HGMA certification standards, and the load tests indicated the glider was plenty safe enough to fly. Looking for improved margins in the stability test results, we modified the systems and vehicle tested again on November 1st, and November 11th. It was during the tests on November 11th that we discovered that the conventional topless stability system, which consisted of an internal floating washout tube supporting the tip and larger tube hinged on the front leading edge and bearing on the crossbar and supporting mid-span twist, was not the most effective way to achieve the stability levels we wanted. We found that eliminating the inboard, “over the crossbar” washout tube and replacing it with two cable supported washout tips well outboard of the crossbar end, we achieved much better stability. With the eventual refinements of that system, we were able in the end to achieve vehicle test pitch stability results that were well above the HGMA minimums, and that compared favorably to the results we had obtained with bridle equipped high performance gliders such as the XC. Those stability levels, we felt, were good enough to go to market with.
During these tests we learned again some lessons we had previously learned about optimizing the stability configuration of sails supported by bridles. On a high aspect ratio wing, with a short root chord, allowing the inboard section of the sail to blow down while supporting the outboard (and therefore farthest aft) section can improve stability. In other words, supporting twist outboard is more important than providing a reflexed airfoil section across the span.
In mid November, following the third series of vehicle tests, we commenced the flight test program for prototype #1. Because of our initial success with the vehicle load tests, we were focusing all of our resources on aspects of the design other than the structural design of the spars, and we didn’t make another set of spars until December. This would later come back to bite us.
Early flight testing of the glider was extremely encouraging, though in a somewhat unexpected direction. Being November, general conditions were light; it was soarable, but the lift was weak. On the first soaring flight of the prototype, it demonstrated a remarkable improvement in climb rate, and a significantly lower stall speed as compared to the XC. The handling was a little heavy and slow, but the qualitative characteristics were superb. We were excited.
With the deadline for Australia closing, we produced 2 more sets of spars in a revised pre-production configuration and built our second prototype glider. On Christmas Eve we performed HGMA pitching moment tests on prototype number two and obtained acceptable values. We built prototype number three and in early January, Chris Arai left for Australia to fly in the Bogong Cup and the Pre-Worlds against the best pilots on the latest prototypes from the other manufacturers. Rupe Plattner from Austria would meet him there and fly the other prototype. Meanwhile, we continued development. Fabricating the two competition prototypes had consumed a month of valuable development time but it was crucial as an independent evaluation of our progress. Chris’ report after Australia didn’t have any surprises. He loved the climb, tolerated the handling and was impressed with the glide but was losing at the highest speeds to the best of the competition. Still, he placed fifth in the Bogong Cup, which indicated we were close to catching up to the rest of the field in performance, in spite of their big head start. Chris’ glider had an early version of the VG system, and he didn’t have as much range on the tight end as we would eventually incorporate. He and Nelson Howe also came back with a name for the floating internal washout tubes which they referred to as ‘sprogs’. Since very few of our customers are familiar with Australian slang, the name took.
By the end of January, we thought we were ready to start spar production. In early February we took a new set of spars back to the airport for another complete set of vehicle tests. This time we had a premature failure of one spar. We spent another month and fabricated 6 more prototype spars before we achieved our structural objectives and a final configuration.
The load capacity of the spar is astounding. At ultimate load, there is over 20,000 lb. of tension in the top spar cap and equal compression in the bottom. We proof load every production spar to 500lb cantilevered at 116 inches (photo) to insure quality control. That load also exceeds the load applied to the spar during HGMA testing and is the highest load we can apply without permanently deforming the 0.375 thick 7075-T6 aluminum plates bonded into the cap strips to resist the shear and bearing stress. As you can see in the photo, at 500 lb. the spar looks like a fishing pole. The tip deformation is approximately 22 inches. (photo in test jig). There is no damage to the spar if it can sustain the load and return to zero deflection.
On the final prototype Fusion, I increased the bottom surface chord to support the sail closer to the trailing edge. I also replaced the 2 cable supported washout tubes with 1 cable supported tube. That tube supports 3 battens by a very stiff laterally aligned carbon sandwich batten that stays in the sail. The pitch test results of this configuration improved significantly even with the sail supported at lower levels than the gliders Chris took to Australia. The more effective the stability system is, the lower it can be set to achieve a given level of stability. That’s important because on topless gliders, the height of the sprogs directly effects both performance and handling. Unlike bridles, which are passive in the normal angle of attack range, the sprogs need to be set high enough that they actually affect pitch pressures and roll rates in normal flight. The lower sprog settings allowed by the more effective system therefore reduced the excessively high pitch pressure that we had on the earlier prototypes and yielded better handling.
We also developed an elevated hang system and refined the cam VG system during this period. Cam VG works by rotating a plate at the xbar leading edge junction to push the leading edge out, instead of by pulling the crossbar center joint aft along the keel. There are several advantages to the cam VG. The glider’s anhedral and bottom side wire tension remain constant throughout the VG range, instead of increasing at tight settings. The constant anhedral makes the glider less roll unstable and easier to control when VG tight, and the constant side wire tension allows for tighter side wires VG loose which helps ground handling. Also, the VG activation pressures are much lighter. Finally, the center crossbar junction is fixed at one location on the keel which is structurally and mechanically advantageous.

Every year, Fly and Glide magazine hosts Induga, which is a large exposition for hang glider and paraglider pilots in Augsburg, Germany at the end of February. G.W. Meadows wrote an article for HGM this year summarizing the topless gliders that were on display. I brought a Fusion to Induga that featured the same stability configuration that we later HGMA certified, and at that time it was the only model of those that have since been HGMA certified that was in final configuration. The two other manufacturers that have HGMA certified topless gliders now have very similar stability support configurations to the Fusion. Both encountered more or less the same results during their development program that I reported above. That reinforces our experience that the inboard, crossbar supported sprog is relatively less effective than the more outboard support provided by the Fusion type configuration.
The first major international meet of the year in the Northern Hemisphere happens a month after Induga in Bassano, Italy. This year almost 200 pilots took part, and it was to be our first chance to test the performance of what we hoped would be the final configuration. With only 4 Fusions entered in the meet, we were outnumbered by as much as seven to one by some other models. We didn’t expect to place well, but we hoped to find out how much progress we’d made since Australia. As it turned out, we scored on both accounts. Chris Arai placed 2nd, the highest placing ever by an American pilot at Bassano, which is incredible considering that it was his first time there. Stefan Waldhart placed 9th on a second Fusion with only one flight on the glider before the contest. Also, Chris reported that no-one was outperforming him at any speed.
The conditions at Bassano were very turbulent this year and one European topless design went negative and broke up during the meet. Chris reported, “The air was very turbulent at times on the first day and generally rough both days. The first day’s most severe turbulence came from a very strong wind shear, whereas the second day was mostly high pressure thermals and some wind shear. The glider was very confidence inspiring on both days, although on the first day I hit some evil air that I decided wouldn’t be profitable to hang around in.” We were almost as happy with this evaluation as we were with the reported performance gains.
The last few weeks between “final” prototype configuration of the glider and nailing down the truly final specifications for each and every one of the new parts the Fusion required were among the most frustrating for everyone involved. During the prototype development stage, all of the numerous new parts required for the Fusion had had to be painstakingly hand made by Tom Blaty, our in house machinist, or by Don or Dan Jester our outsource machinists. And we always needed the parts “yesterday” to keep the project moving. Parts were anodized one at a time. Ken Howells repeatedly assembled and disassembled sails for testing or modification. Every three weeks had been a new crisis–Australia, Induga, Bassano and finally the East Coast Challenge. Now, we were anticipating production, and the situation was, if possible, even worse. A typical week at Wills Wing during this time might go like this:
Monday:
Rick (purchasing agent): “You know there’s seven separate operations in (the part in question, and just one of fifty-seven new parts that had to be designed, tested and produced just for the Fusion), and it’s going to take at least twelve weeks from final print to production parts. You got a final print yet?
Me (design department): No, we still have a few more tests to run before I can release it.
Tuesday, Wednesday, Thursday:
Rick: (same question)
Me: (same answer)
Friday:
Me: “Ok Rick, that part’s a go, the drawing’s on your desk. I need first article by Monday and production parts no later than six weeks!
After several more rounds of vehicle testing in March and April, and HGMA certification on April 16th, we entered the dead zone between having a truly finished configuration and having all the production parts in our hands to produce customer gliders. We shipped the final three pre-production gliders for the ECC to Jim Lee, Mitch Shipley and Pete Lehmann just days before the meet. Mitch was the only one of the three who had even seen a Fusion and he had only one short flight on an early prototype with 7 lb. of lead on the nose to make it trim correctly. Despite their unfamiliarity with the glider, Jim and Pete managed an impressive 2nd and 3rd in the meet. One month later, Pete set a new East Coast distance record of 182 miles from Templeton, PA to Bel Air, MD.
We managed to rush the first few production gliders out in time for the rest of the competition season. In June, Jim Lee won the Sandia Classic on a Fusion, and shortly after Chris and Jim finished 1st and 2nd at King Mountain. Finally, just as this went to press, Chris Arai won the U.S. Nationals. The development gap had been closed, and the performance capabilities of the Fusion had been clearly shown to be at the very least the equal of any of the other topless gliders.
It remains to be seen whether the new “topless” technology will change the course of hang glider design. The designers and manufacturers have brought a product to market. The market – that is the pilots who buy the gliders – will now decide if this is to be the way of the future.
Throughout this article, the reference ‘we’ includes a large group of individuals who contributed to almost every aspect of the final product, but primarily two of my partners at Wills Wing – Mike Meier and Rob Kells. Mike actually logged the most flight testing of the three of us, and was also responsible for administering the vehicle test program and preparing the HGMA Certification package. Also, there is no way we would have achieved most of the deadlines without the indefatigable efforts of Rick Zimbelman and Ken Howells.
I encourage anyone interested in the Fusion to visit our web site at www.www.willswing.com. There are pictures and specs, and you can download the complete owners manual which includes exploded parts diagrams of all assemblies and much more information than we have room to present here.